ТЕХНО: Яндекс про технологии
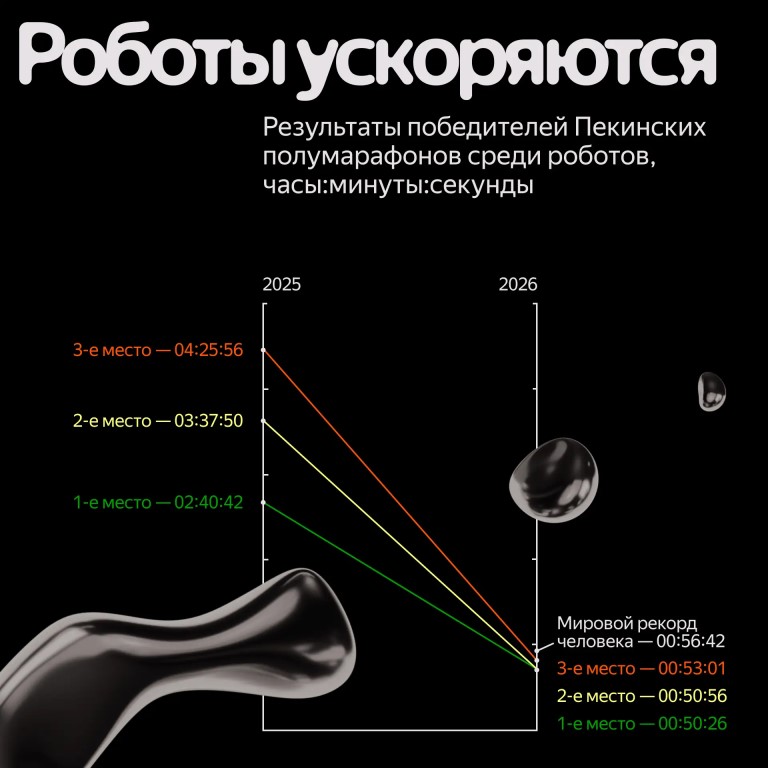 🦿 Робот впервые побил рекорд
человека в полумарафоне, пробежав дистанцию на 6 минут быстрее. При этом в прошлом году на том же Пекинском забеге роботы отставали от человека по скорости в несколько раз, а многие даже не смогли добежать до финиша.
Спросили у руководителя отдела автономных роботов-гуманоидов в Яндексе Алексея Лещанкина, почему роботы так быстро прогрессируют в скорости бега и почему это важно.
Откуда такой прогресс — три причины
Раньше движения робота программировали вручную — инженеры сами подбирали параметры ходьбы. Теперь робот «учится» бегать в симуляторе методом проб и ошибок, а потом навык переносят на железо. Полумарафон — отличный полигон для таких роботов: плоско, предсказуемо, одна фаза движения.
Год назад почти все роботы на полумарафоне управлялись людьми, а в 2026-м ~40% были автономными: они используют лидары, самостоятельно удерживают траекторию, реагируют на помехи. Это прямой перенос технологий из автономных автомобилей в роботов.
Железо роботов стали затачивать именно под бег. У робота-рекордсмена от Honor рост 169 см, длинные ноги, жидкостное охлаждение, почти без рук и головы. Производитель перенёс сюда наработки из смартфонов: батареи, охлаждение, механическую надёжность.
Помогает и масштаб конкуренции в Китае: в этом году было 112 команд и более 300 роботов против 21 годом ранее. При такой плотности гонки темп улучшений резко растёт.
Соревнование алгоритмов, а не железа
Важная деталь: подиум заняли три одинаковых робота, но три разные команды. Перед нами эксперимент: одинаковое железо, разный софт. В итоге — разница больше двух минут на дистанции. Как так получается?
🔸 Политика обучения определяет, насколько робот может держать высокую скорость, не падая. Есть компромисс: при более быстрой походке робот чаще падает.
🔸 Перенос из симуляции в реальность. Чем точнее модель в симуляторе, тем меньше политика «ломается» на реальном железе.
🔸 Адаптация походки под конкретный режим. Походка на длинной дистанции — и ресурс батареи, и нагрев приводов, и риск падения.
🔸 Навигация и управление. Робот, занявший второе место, врезался в ограждение у финиша — это как раз про навигацию, а не про скорость.
🔸 Энергоменеджмент. Политика, которая умеет держать тепло и заряд в безопасных границах, не уходя в троттлинг, выигрывает минуты на дистанции.
Главный вывод: железо задаёт потолок возможностей, а софт определяет, насколько близко к этому потолку робот подошёл. Две минуты разницы на одинаковом шасси — и есть цена алгоритмов.
В чём польза таких соревнований
🔸 Отвод тепла и ресурс приводов релевантны для длительной работы роботов.
🔸 Политики обучения локомоции — база для контроля всего тела робота.
🔸 Автономная навигация полезна в складских и уличных задачах.
Но есть и то, что плохо переносится на другие области. Например, навык работы с предметами в беге не используется вообще, а это 80% бытовых и офисных задач. Для полезной работы нужен не бегун, а универсальная платформа — другая инженерная задача.
Итог: полумарафон — честный тест на выносливость, автономность и умение бегать. Но путь от «робот обогнал человека на 21 км» до «робот приносит кофе и ничего не ломает по дороге» идёт через другие вещи — безопасность, работу с предметами и восприятие, а не через скорость.
Подписывайтесь 👉 @techno_yandex
🦿 Робот впервые побил рекорд
человека в полумарафоне, пробежав дистанцию на 6 минут быстрее. При этом в прошлом году на том же Пекинском забеге роботы отставали от человека по скорости в несколько раз, а многие даже не смогли добежать до финиша.
Спросили у руководителя отдела автономных роботов-гуманоидов в Яндексе Алексея Лещанкина, почему роботы так быстро прогрессируют в скорости бега и почему это важно.
Откуда такой прогресс — три причины
Раньше движения робота программировали вручную — инженеры сами подбирали параметры ходьбы. Теперь робот «учится» бегать в симуляторе методом проб и ошибок, а потом навык переносят на железо. Полумарафон — отличный полигон для таких роботов: плоско, предсказуемо, одна фаза движения.
Год назад почти все роботы на полумарафоне управлялись людьми, а в 2026-м ~40% были автономными: они используют лидары, самостоятельно удерживают траекторию, реагируют на помехи. Это прямой перенос технологий из автономных автомобилей в роботов.
Железо роботов стали затачивать именно под бег. У робота-рекордсмена от Honor рост 169 см, длинные ноги, жидкостное охлаждение, почти без рук и головы. Производитель перенёс сюда наработки из смартфонов: батареи, охлаждение, механическую надёжность.
Помогает и масштаб конкуренции в Китае: в этом году было 112 команд и более 300 роботов против 21 годом ранее. При такой плотности гонки темп улучшений резко растёт.
Соревнование алгоритмов, а не железа
Важная деталь: подиум заняли три одинаковых робота, но три разные команды. Перед нами эксперимент: одинаковое железо, разный софт. В итоге — разница больше двух минут на дистанции. Как так получается?
🔸 Политика обучения определяет, насколько робот может держать высокую скорость, не падая. Есть компромисс: при более быстрой походке робот чаще падает.
🔸 Перенос из симуляции в реальность. Чем точнее модель в симуляторе, тем меньше политика «ломается» на реальном железе.
🔸 Адаптация походки под конкретный режим. Походка на длинной дистанции — и ресурс батареи, и нагрев приводов, и риск падения.
🔸 Навигация и управление. Робот, занявший второе место, врезался в ограждение у финиша — это как раз про навигацию, а не про скорость.
🔸 Энергоменеджмент. Политика, которая умеет держать тепло и заряд в безопасных границах, не уходя в троттлинг, выигрывает минуты на дистанции.
Главный вывод: железо задаёт потолок возможностей, а софт определяет, насколько близко к этому потолку робот подошёл. Две минуты разницы на одинаковом шасси — и есть цена алгоритмов.
В чём польза таких соревнований
🔸 Отвод тепла и ресурс приводов релевантны для длительной работы роботов.
🔸 Политики обучения локомоции — база для контроля всего тела робота.
🔸 Автономная навигация полезна в складских и уличных задачах.
Но есть и то, что плохо переносится на другие области. Например, навык работы с предметами в беге не используется вообще, а это 80% бытовых и офисных задач. Для полезной работы нужен не бегун, а универсальная платформа — другая инженерная задача.
Итог: полумарафон — честный тест на выносливость, автономность и умение бегать. Но путь от «робот обогнал человека на 21 км» до «робот приносит кофе и ничего не ломает по дороге» идёт через другие вещи — безопасность, работу с предметами и восприятие, а не через скорость.
Подписывайтесь 👉 @techno_yandex Если у вас установлено приложение,
вы можете сразу перейти в канал